

近日,機械與電子工程學院劉雪美教授團隊在《Journal of Field Robotics》,發(fā)表題為“A Breeding Cotton Harvesting Robot: Design, Integration, and Field Evaluation”的最新研究成果。碩士研究生盧國航為第一作者,機電學院劉雪美教授為文章通訊作者,苑進教授、范嘉瑋碩士生、戴念祖博士生參與了本課題研究。
棉花作為我國重要的經濟作物,在中東部及黃淮海等地區(qū)廣泛種植。然而,由于棉鈴成熟期不一致、采收需分批進行,加之育種田地塊小、分布零散,傳統(tǒng)大型采棉機難以進場作業(yè)或無法實現(xiàn)多次高質量選擇性采收。目前,小地塊育種材料的采收仍以人工為主,不僅勞動強度大、成本高,而且在多風多雨天氣條件下易發(fā)生采收延誤,導致品質下降甚至減產風險。多批次、選擇性、精準化采收已成為制約小規(guī)模棉花機械化的關鍵瓶頸。
不同于規(guī)模化一次性采收的大型采棉裝備,小地塊棉花采收具有“成熟離散、空間分散、姿態(tài)多樣”的特點。棉鈴分布高度隨機,成熟時間差異顯著,采收過程具有明顯的離散性和不確定性,難以實現(xiàn)類似批量作業(yè)的高速連續(xù)采摘。
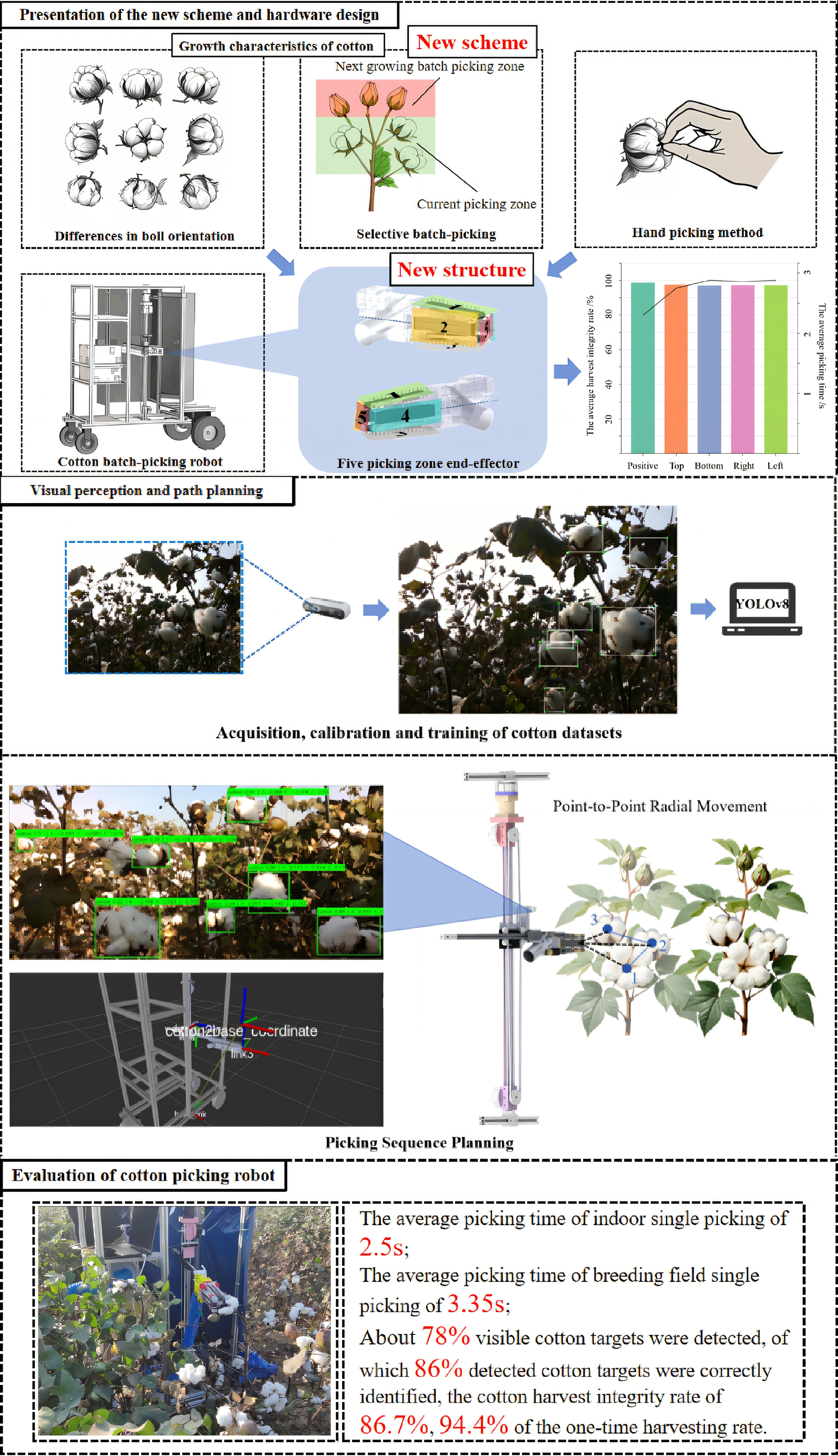
針對小地塊棉花多批次選擇性采收的技術難題,研究團隊提出了一種創(chuàng)新性的機械化采收方案。團隊設計了基于五采摘區(qū)(FPZ)結構的末端執(zhí)行器,通過多采摘區(qū)協(xié)同作業(yè),實現(xiàn)不同姿態(tài)棉鈴的高效選擇性采摘;結合多批次采收方式,能夠針對成熟期差異明顯的棉鈴進行分期采摘。同時,團隊構建了基于ROS2的多機械臂選擇性采收智能控制系統(tǒng),完成了軟硬件集成、調試與優(yōu)化。該研究通過結構創(chuàng)新與作業(yè)模式創(chuàng)新結合,突破了小地塊棉花多批次選擇性采收的關鍵技術瓶頸,為分散種植區(qū)域提供了可行的機械化解決方案,也為提升棉花育種效率、降低人工成本、推動棉花采收智能化發(fā)展奠定了技術基礎。隨著技術在育種田塊的成熟與優(yōu)化,未來有望推廣至分散種植或大面積生產區(qū)域,實現(xiàn)小批次智能采收向規(guī)模化機械化采收的轉化,提升區(qū)域棉花生產效率和產品品質,推動棉花產業(yè)智能化升級。
該研究得到了國家自然科學基金、“十四五”國家重點研發(fā)計劃、山東省棉花產業(yè)技術體系創(chuàng)新團隊機械崗位專家項目和山東省農機研發(fā)制造推廣應用一體化試點項目的資助。
編 輯:萬 千
審 核:賈 波





